Yaw and pitch control tuning using multiobjective optimisation techniques
Oct 1, 2015·,,,·
0 min read
Matheus Garbelini
Victor Alves Ribeiro
Gilberto Reynoso-Meza
Leandro Coelho
Abstract
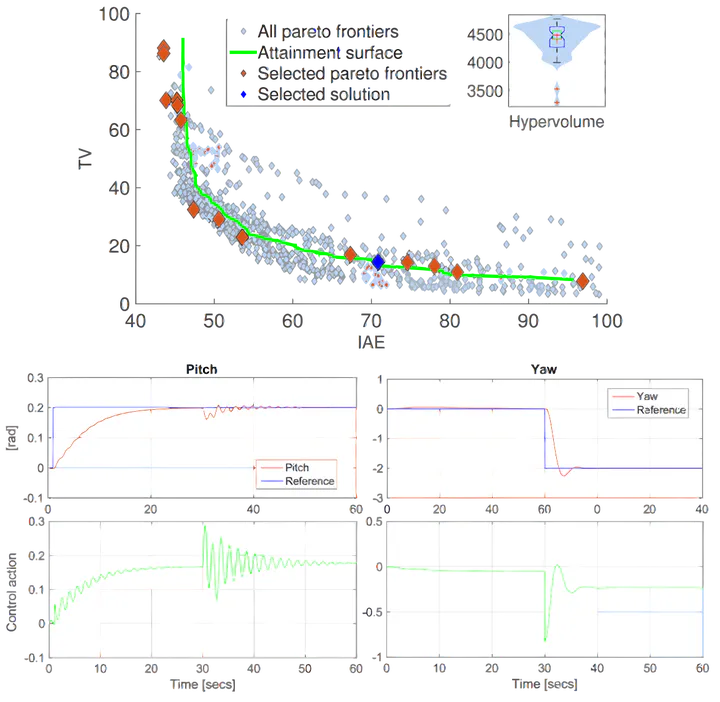
Yaw and pitch control tuning are an usual task (and requirement) for the autonomous flight control device in Unmanned Aerial Systems (UAS), in order to get a desired performance and stability. Multiobjective optimisation techniques can be integrated into the tuning procedure of different processes. They are useful due to its capabilities to depict trade-off between conflicting objectives. In this work, we use such optimisation techniques, in order to appreciate the trade-off between performance and reliability in UAS. For such purpose, different PID controllers are tuned for a two degree of freedom helicopter model, in order to validate its usability.
Type
Publication
XII Simpósio Brasileiro de Automação Inteligente