Multi-Objective Evolutionary Optimization PID Tuning for Longitudinal Movement of an Aircraft
Oct 1, 2017·,·
0 min read
Matheus Garbelini
Reynoso-Meza
Abstract
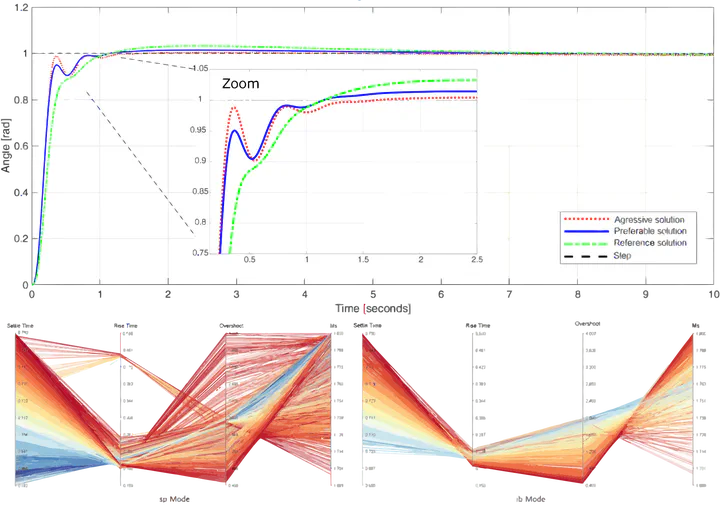
Longitudinal control tuning is one of the principal tasks in the control system of an aircraft as its pitch movement is affected by different flight conditions and most of the times, aggressive environment. In order to get a better flight stability, multi-objective evolutionary optimization techniques can be applied to the tuning procedure in order to depict the trade-off between conflicting objectives. In this paper, we use such techniques to appreciate the trade-off of the aircraft longitudinal angle response. We compare two different algorithms in a four-objective problem that lead longitudinal movement control trough a standard proportional-integralderivative (PID) controller. Keywords— Multi-objective optimization, PID controller, Longitudinal movement.
Type
Publication
XIII Simpósio Brasileiro de Automação Inteligente